《Math for Programmers》笔记-第一部分 向量和图形-练习
二维向量绘图
二维向量绘图
练习2.1:恐龙脚趾尖上的点的X坐标和y坐标是什么?
练习2.2:在平面上画出点(2,-2)和与之对应的箭头
练习2.3:通过观察恐龙各点的位置,推断dino_vectors列表未包含的其余向量。例如,列表已经包含了恐龙尾巴尖上的点(6, 4),但不包含恐龙鼻子上的点(-5, 3)。完成后,dino_vectors列表中应该有由21个坐标对表示的向量。
练习2.4:构建一个以dino_vectors为顶点的Polygon对象,画出将每个点相连的恐龙图像(见图2-11)。 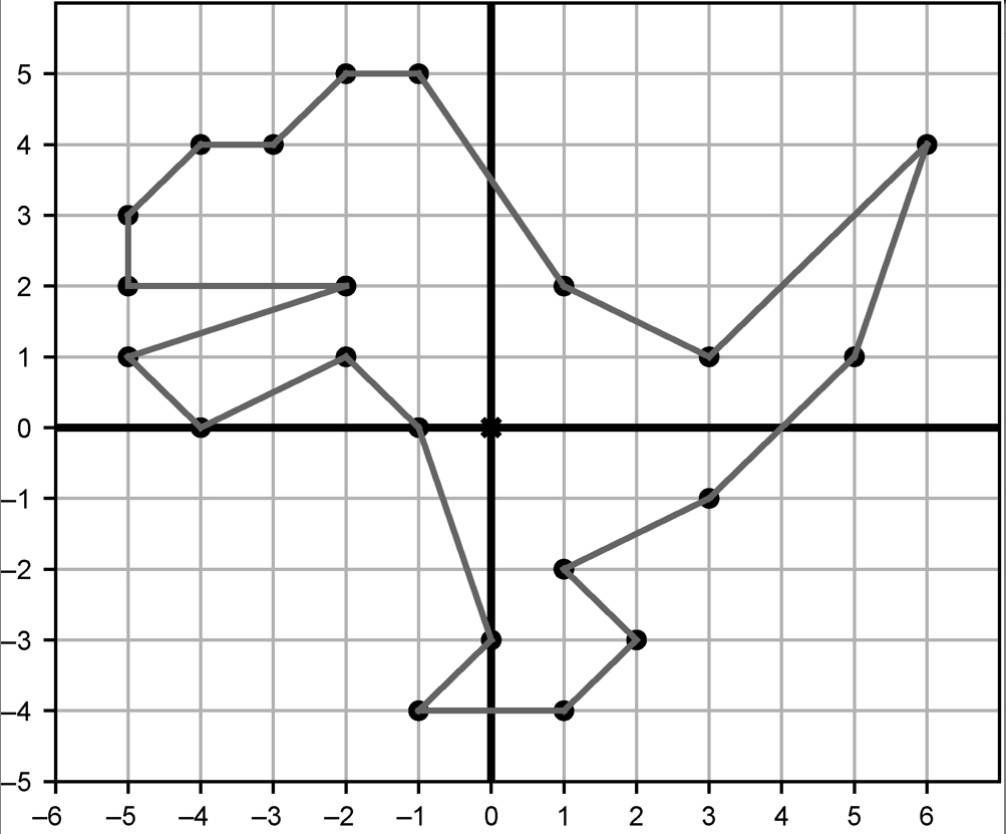
练习2.5:当X坐标在-10到10的范围内时,使用draw函数绘制表示向量(x, x**2)的点。
平面向量运算
练习2.6:对于向量u=(-2,0)、向量v=(1.5,1.5)和向量w=(4,1),u + v、v + w和u + w的结果是什么?u + v + w的结果又是什么?
练习2.7:通过将所有向量各自的X坐标和Y坐标相加,可以实现任意数量的向量相加。例如,向量和(1, 2) + (2, 4) + (3, 6) + (4, 8)有X分量1 + 2 + 3 + 4 = 10与Y分量2 + 4 + 6 + 8 = 20,结果为(10, 20)。实现新的add函数,接收任意多个向量作为参数。
练习2.8:实现函数translate(translation, vectors),接收一个平移向量和一个向量列表,返回一个根据平移向量平移后的向量列表。例如,对于translate ((1,1), [(0,0), (0,1,), (-3,-3)]) ,它应该返回[(1,1),(1,2), (-2, -2)]。
练习2.9(小项目):向量之和v + w与w + v结果相同。用坐标形式的向量和的定义来解释其原因。同时,用图像来说明为什么这在几何上是成立的。
练习2.10:在如图2-28所示的三个箭头向量(标为u、v和w)中,哪一对的和对应的箭头最长?哪一对的和对应的箭头最短? 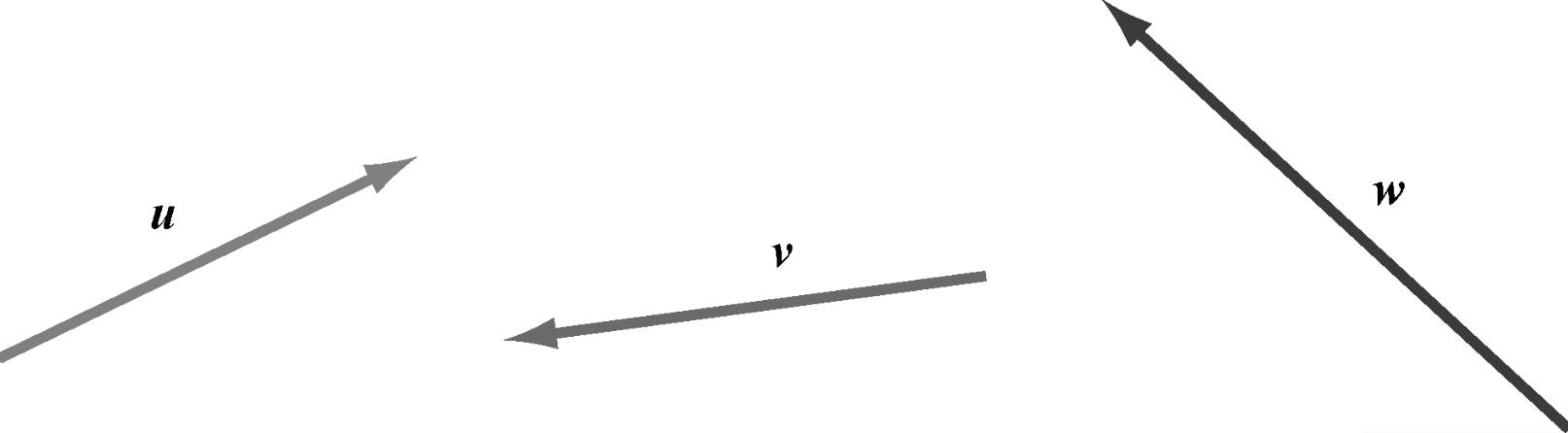
练习2.11(小项目):实现一个处理向量加法的Python函数,显示100个相互不重叠的恐龙图像。这体现了计算机图形学的威力。想象一下,手绘2100个坐标对是一件多么乏味的事情!
练习2.12:对于(3, -2) + (1, 1) + (-2, -2),是X分量还是Y分量更长?
练习2.13:向量(-6, -6)和(5, -12)的分量和长度分别是多少?
练习2.14:假设有一个长为6的向量v和它的X分量(1, 0)。v的坐标可能是什么?
练习2.15:dino_vectors列表中哪个向量的长度最长?用我们实现的length函数快速计算出答案。
练习2.16:假设向量w的坐标是(√2,√3)。那么π * w的坐标近似值是多少?画出原向量和新向量。
练习2.17:写一个Python函数scale(s,v),将输入向量v和输入标量s相乘。
练习2.18(小项目):用代数方法证明,将坐标按照一个系数缩放,会将向量的长度以同等系数缩放。假设一个长度为c的向量坐标为O。证明,对于任意非负实数s,(s * a,s * b)的长度是s * c。(s不能是负值,因为向量的长度不可能为负。)
练习2.19(小项目):假定z=(-1,1)和v=(1,1),而r和s是实数,并且假设-3 < r < 3且-1 < s < 1。在平面上,向量r * z + s * v可能的终点是哪里?请注意,向量的运算顺序和数的运算顺序一致。我们假设先进行标量乘法,然后进行向量加法(除非有括号)。
练习2.20:用代数法证明为什么一个向量和其负向量具有相同的长度。
练习2.21:在如图2-33所示的七个用箭头表示的向量中,哪两个是一对相反的向量? 
练习2.22:假定u是任意二维向量。u + (-u)的坐标是什么?
练习2.23:对于向量u=(-2,0)、v=(1.5,1.5)和w=(4,1),v - w、z - v和w - v的结果分别是什么?
练习2.24:实现Python函数subtract(v1,v2),返回v1 - v2的结果。该函数接收两个二维向量作为输入,返回一个二维向量作为输出。
练习2.25:实现Python函数distance(v1,v2),返回两个输入向量之间的距离。(注意:上一个练习中的subtract函数已经返回了两个向量之间的位移。)
练习2.26(小项目):令u为向量(1, -1)。假定有另一个正整数坐标为(n,m)(n > m)的向量v,且它与u的距离为13,那么从u到v的位移是多少?
平面上的角度和三角学
练习2.27:确认笛卡儿坐标(-1.34, 2.68)对应的向量的长度约为3。
练习2.28:图2-45中是一条从X正半轴开始按逆时针方向旋转22°角的直线。根据图2-45,tan(22°)的近似值是多少? 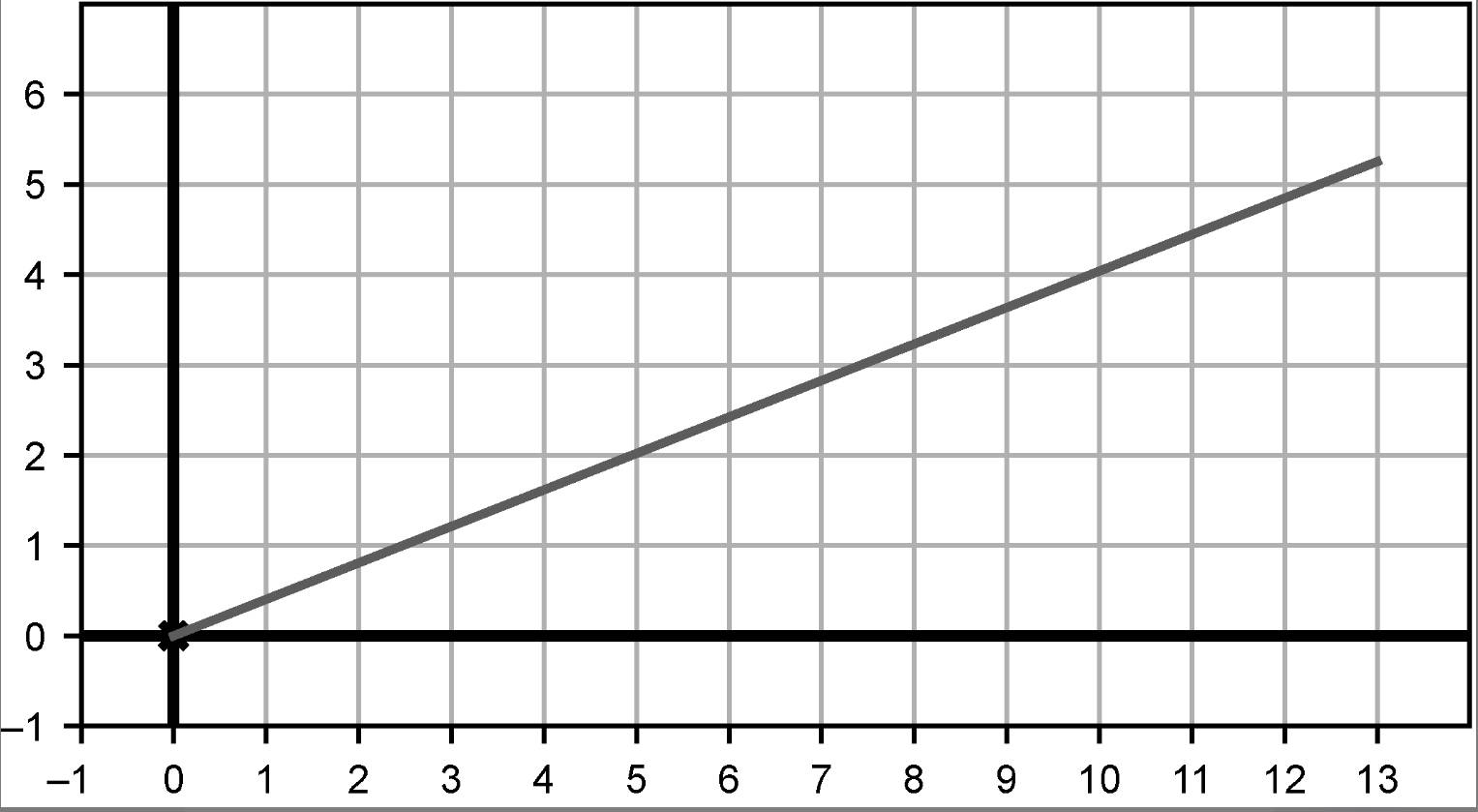
练习2.29:转换问题的角度,假设我们知道了一个向量的长度和方向,想找到它的分量该如何做呢?一个长度为15的向量指向37°角,其X分量和Y分量是多少?
练习2.30:假设从原点出发,沿着从X轴正半轴逆时针旋转125°的方向移动8.5个单位,那么最终坐标是什么?已知sin(125°)=0.819、cos(125°)=-0.574,请画图来表示走过的角度和路径。
练习2.31:0°、90°和180°的正弦和余弦各是多少?换句话说,在这些方向上,每单位距离经过多少个垂直和水平单位?
练习2.32:图2-48对于一个直角三角形给出了一些精确的测量数据。首先,确认这些长度在直角三角形中的有效性,因为它们必须满足勾股定理。然后,用图中的数据计算sin(30°)、cos(30°)和tan(30°)的值,精确到小数点后三位。 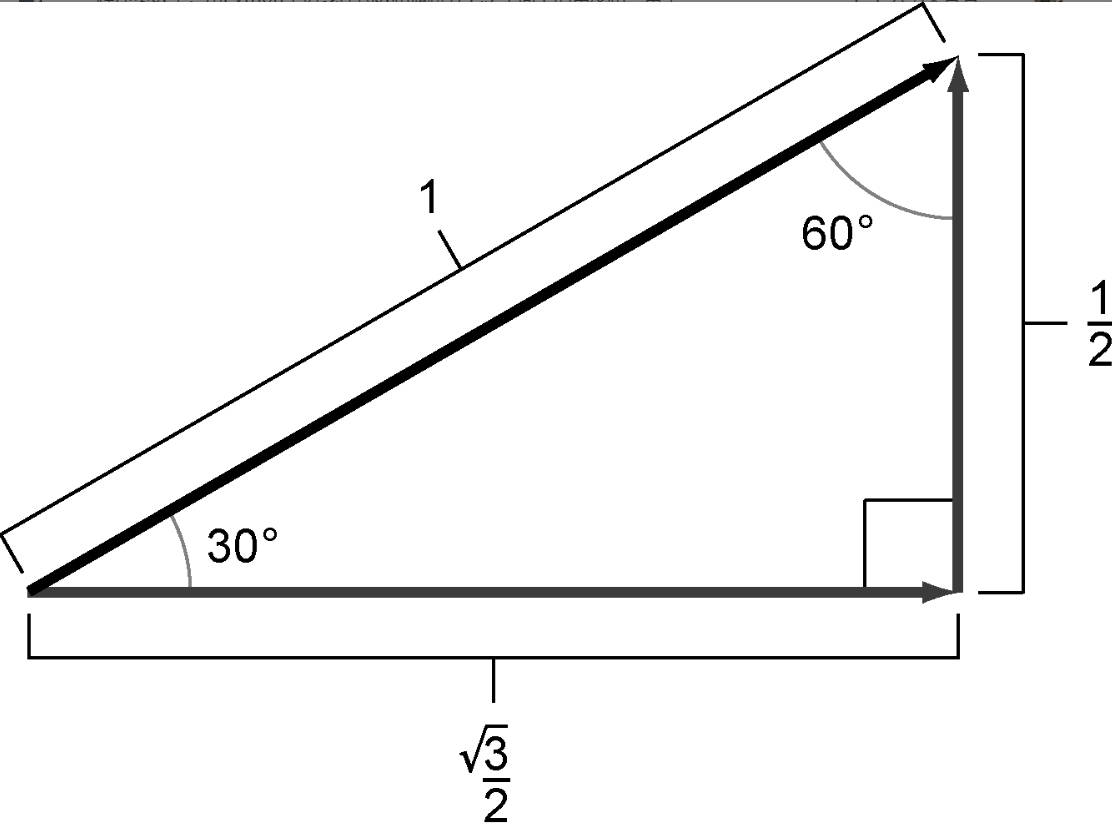
练习2.33:从另一个角度观察上一个练习中的三角形,用它计算sin(60°)、cos(60°)和tan(60°)的值,精确到小数点后三位。
练习2.34:已知50°的余弦值是0.643。sin(50°)的值是多少,tan(50°)的值又是多少?通过画图来计算。
练习2.35:116.57°对应的弧度是多少?用Python计算这个角的正切值,并确认它约等于-2。
练习2.36:cos(10π/6)和sin(10π/6)的值为正还是为负?使用Python计算它们的值并确认。
练习2.37:用下面的列表推导式创建1000个极坐标对应的点。
练习2.38:通过“猜测检查法”(guess-and-check)找出(-2, 3)对应的弧度(见图2-52)。 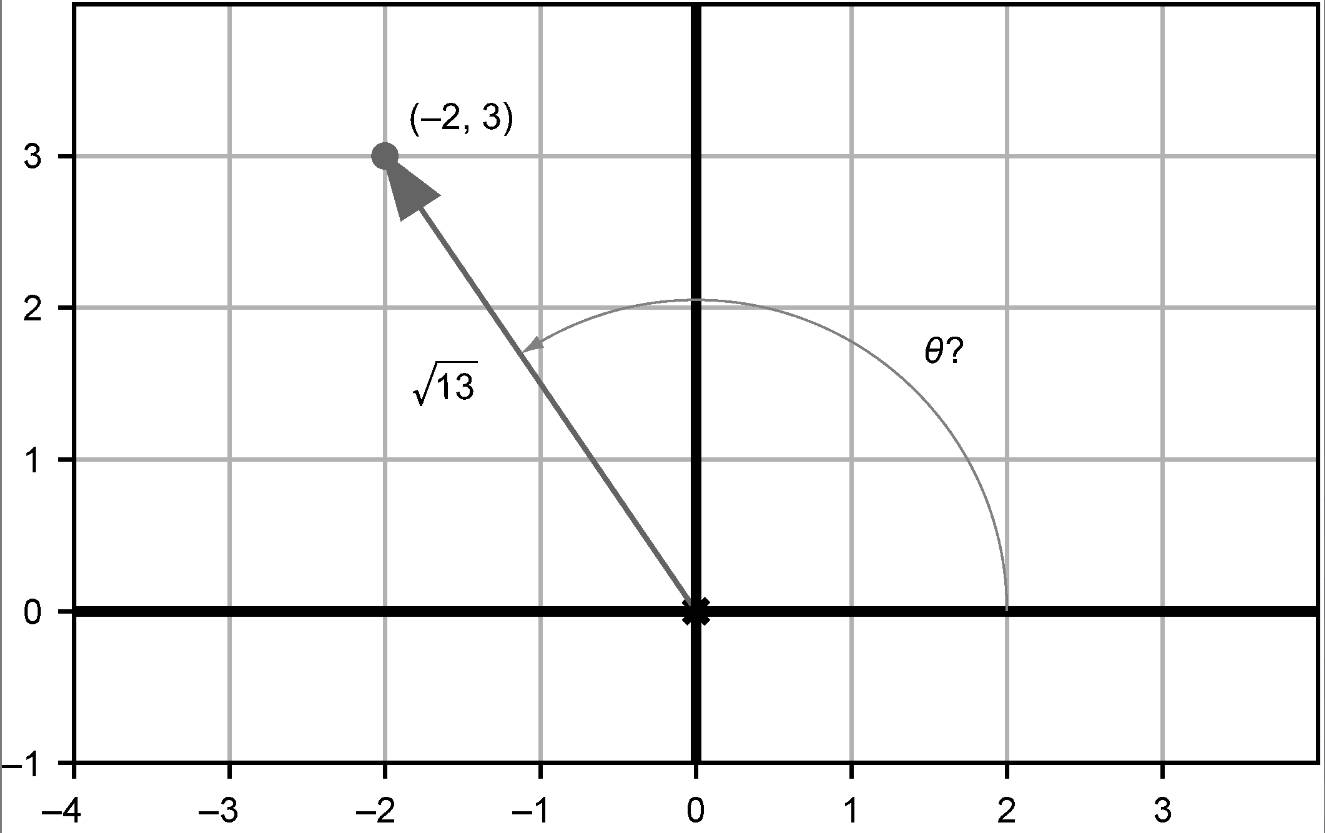
练习2.39:在平面上找到另一个与θ有相同正切值(即-3/2)的点。使用Python的反正切函数math.atan来求这个点的弧度值。
练习2.40:不使用Python,算出笛卡儿坐标(1, 1)和(1, -1)对应的极坐标。找到答案之后,使用to_polar来检查一下。
练习2.41(小项目):如图2-53所示,恐龙嘴巴的夹角是多少?脚趾的夹角是多少?尾巴的夹角是多少? 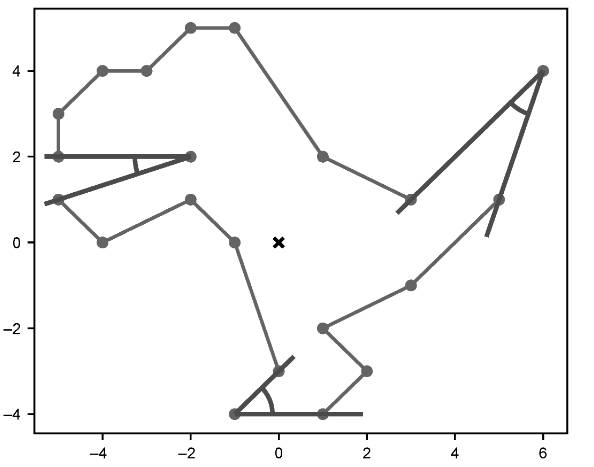
向量集合的变换
练习2.42:实现rotate(angle, vectors)函数,接收笛卡儿坐标向量数组,并将这些向量旋转指定的角度(根据角度的正负来确定是逆时针还是顺时针)。
练习2.43:实现函数regular_polygon(n),返回一个规则n边形(即所有角和边长都相等)各顶点的笛卡儿坐标。例如,polygon(7)返回如图2-57所定义七边形的顶点向量。 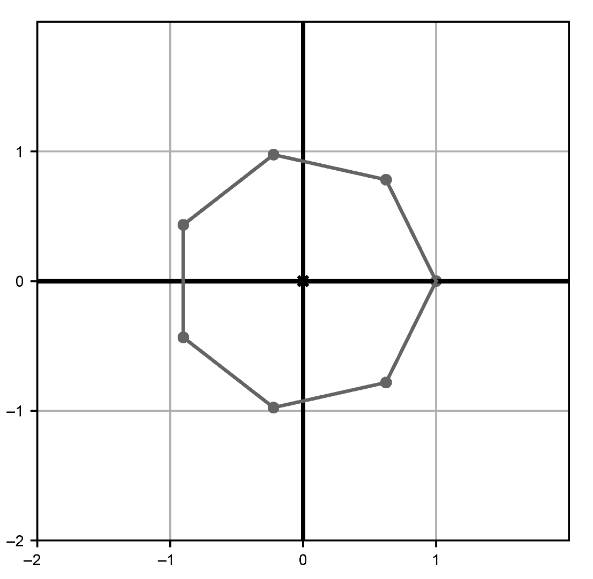
练习2.44:先将恐龙按向量(8, 8)平移,再将其旋转5π/3(见图2-58),结果是什么?和先旋转再平移的结果一样吗? 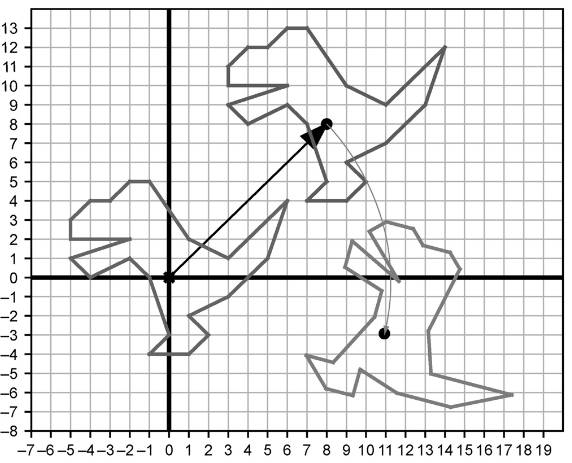
上升到三维世界
在三维空间中绘制向量
练习3.1:绘制表示坐标(-1, -2, 2)的点和三维箭头,以及使箭头更立体的虚线框。可以手动绘制来进行练习,不过从现在开始,我们将使用Python来绘图。
练习3.2(小项目):有8个三维向量的坐标都是+1或-1。例如,(1, -1, 1)就是其中之一。将这8个向量绘制成点。然后想办法通过Segment3D对象用线段将它们连接到一起,以形成立方体的轮廓。
三维空间中的向量运算
练习3.3:将(4, 0, 3)和(-1, 0, 1)绘制为Arrow3D对象,使它们在三维空间中以两种顺序首尾相接。它们的向量和是多少?
练习3.4:假设设置vectors1= [ (1,2,3,4,5), (6,7,8,9,10) ]和vectors2=[ (1,2), (3,4), (5,6) ]。在不使用Python求值的情况下,zip(vectors1)和zip(vectors2)的长度分别是多少?
练习3.5(小项目):下面的代码创建了一个包含24个Python向量的列表。
1
2
form math import sin, cos, pi
vs = [(sin(pi * t/6), cos(pi * t/6), 1.0/3) for t in range(0, 24)]
这24个向量的和是多少?把这24个向量绘制成首尾相接的Arrow3D对象。
练习3.6:编写函数scale(scalar,vector),返回输入标量乘以输入向量的结果。具体地说,这个函数要同时适用于二维和三维向量,以及有任意多坐标的向量。
练习3.7:设u=(1,-1,-1)和v=(0,0,2)。u +1/2(v - u)的结果是什么?
练习3.8:试着在不使用代码的情况下找到这个练习的答案,然后检查你的答案是否正确。二维向量(1, 1)的长度是多少?三维向量(1, 1, 1)的长度是多少?我们还没有讨论到四维向量,但是它们有四个坐标,而不是两个或三个。猜一下,坐标为(1, 1, 1, 1)的四维向量的长度是多少?
练习3.9(小项目):坐标3、4和12能以任意顺序创建一个向量,其长度是整数13。这很不寻常,因为大多数数不是完全平方数,所以长度公式中的平方根通常返回无理数。找出另一组三个整数,以它们为坐标定义的向量也有整数长度。
练习3.10:找到一个与(-1, -1, 2)方向相同但长度为1的向量。
点积:测量向量对齐
练习3.11:根据图3-33,将u * v、u * w和 v * w从大到小排列 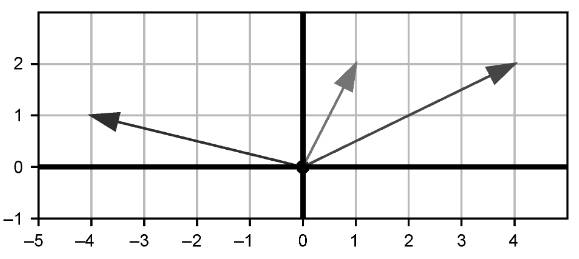
练习3.12:(-1, -1, 1)和(1, 2, 1) 的点积是多少?这两个三维向量的夹角是大于90°、小于 90°,还是正好等于90°?
练习3.13(小项目):对于两个三维向量u和v,(2u) * v和u * 2v的值都等于2(u * v)。在这种情况下,u * v = 18,而(2u) * v和u * 2v都是36,是原结果的2倍。请证明这个规则对于任意实数s都适用,而不仅仅是2。换句话说,请证明对于任意s,(su) * v和u * (sv)的值都等于s(u * v)。
练习3.14(小项目):用代数证明向量与其自身的点积是其长度的平方。
练习3.15(小项目):找出长度为3的向量u和长度为7的向量v,使u * v = 21。再找出一对向量u和v,使u * v = -21。最后,再找出三对长度分别为3和7的向量,并证明它们的长度都在-21和21之间。
| 练习3.16:设u和v是向量,其中 | u | =3.61, | v | =1.44。如果u和v的夹角是101.3°,那么u*v是什么? |
练习3.17(小项目):通过把(3, 4)和(4, 3)转换为极坐标并取角的差值,来求出它们之间的角度。答案是以下哪一个?
(a) 1.569(b) 0.927(c) 0.643(d) 0.284
练习3.18:(1, 1, 1)与(-1, -1, 1)之间的角是多少度?
向量积:测量定向区域
练习3.19:如图3-45所示,各图中都存在三个相互垂直的箭头,分别表示X轴、Y轴和Z轴的正方向。在这些显示为三维框的透视图中,框的背面是灰色的。四幅图中的哪一个与我们选择的相符?也就是说,哪张图显示了我们所画的X轴、Y轴和Z轴,即使从不同的角度来看也是如此? 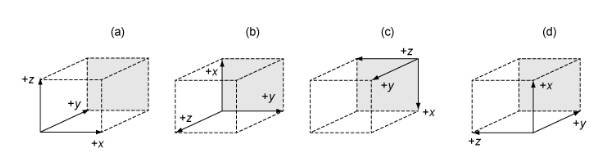
练习3.20:如果把三条坐标轴立在镜子前,镜子里图像的方向是相同的还是不同的呢?
练习3.21:(0, 0, 3) × (0, -2, 0)的结果指向什么方向?
练习3.22:(1, -2, 1)和(-6, 12, -6)向量积的坐标是多少?
练习3.23(小项目):如图3-47所示,平行四边形的面积等于它的底边长乘以它的高。 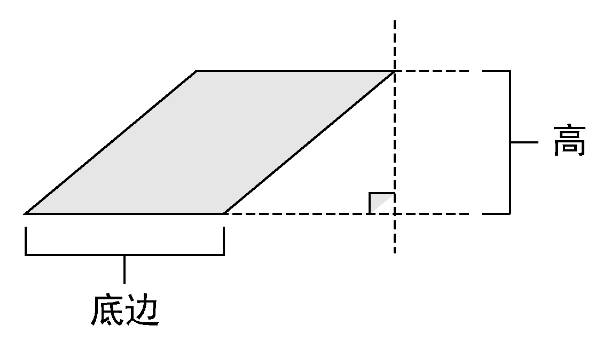
练习3.24:向量积(1, 0, 1) × (-1, 0, 0)的结果是什么?
(a) (0, 1, 0)(b) (0, -1, 0)(c) (0, -1, -1)(d) (0, 1, -1)
练习3.25:使用Python的cross函数计算(0,0,1) * v,其中第二个向量v是几个不同的值。每个结果的Z坐标是多少,为什么?
练习3.26(小项目):用代数法证明u * v垂直于u和v,不管u和v的坐标是多少。
在二维平面上渲染三维模型
练习3.27(小项目):找到定义八面体12条边的向量对,并用Python绘制出所有的边。
练习3.28:八面体的第一个面是[(1, 0, 0), (0, 1, 0), (0, 0, 1)]。这是定义该面顶点的唯一有效顺序吗?
变换向量与图形
变换三维对象
练习4.1:实现一个translate_by函数(4.1.2节中有所提及),以一个平移向量作为输入并返回一个平移函数作为输出。
练习4.2:渲染沿Z轴负方向平移了20个单位的茶壶,产生的图像是什么样的?
练习4.3(小项目):当按0和1之间的标量缩放每一个向量时,茶壶会发生什么变化?按系数-1缩放,又会发生什么变化?
练习4.4:对茶壶首先应用translate1left,然后应用scale2。结果与相反的组合顺序有什么不同?为什么会这样?
练习4.5:compose(scale_by(0.4), scale_by(1.5))变换的效果是什么?
练习4.6:将compose(f,g)函数修改为compose(*args),它将几个函数作为参数,并返回一个新的函数,即它们的组合。
练习4.7:实现函数curry2(f),接收一个有两个参数的Python函数f(x,y),并返回一个柯里化版本。例如,对于g = curry2(f),f(x,y)和g(x)(y)应该返回相同的结果。
练习4.8:在不执行代码的情况下,说出变换compose(rotate_z_by(pi/2),rotate_x_by(pi/2))的结果是什么。如果换一下组合的顺序呢?
练习4.9:实现函数stretch_x(scalar,vector),只在X方向上将目标向量按给定系数缩放。同时实现stretch_x_by的柯里化版本,使stretch_x_by(scalar)(vector)返回同样的结果。
线性变换
练习4.10:再考虑对所有坐标执行二次方运算的向量变换S,用代数方法证明S(sv) = sS(v)并不是对所有标量s和二维向量v都成立。
练习4.11:假设T是一个向量变换,且T(O)!=0,其中O代表所有坐标都等于零的向量。根据定义,为什么T是非线性的?
练习4.12:恒等变换是返回向量与接收向量相同的向量变换,用大写的I表示。因此,对于所有向量v,其定义写成I(v)=v。为什么I是一个线性变换?
练习4.13:(5, 3)和(-2, 1)之间的中点是什么?把这三个点都画出来,看看你的做法是否正确。
练习4.14:再考虑把v=(x,y)转移到(x²,y²)的非线性变换S(v)。用第2章的绘图代码将整数坐标为0~5的36个向量v全部绘制成点,然后分别绘制它们的S(v)。在v的作用下,向量在几何上会发生什么?
练习4.15(小项目):基于属性的测试是一种单元测试,涉及为程序创造任意输入数据,然后检查输出是否满足所需条件。一些流行的Python库,如Hypothesis(可通过pip获得),可以很容易地配置它。使用你选择的库,实现基于属性的测试来检查向量变换是否是线性的。
具体来说,给定一个以Python函数形式实现的向量变换T,生成大量随机向量对,并对所有这些向量断言,T会保持它们的和。然后,对每组标量和向量做同样的事情,来确定T保持了标量乘积。应该可以发现,像rotate_x_by(pi/2)这样的线性变换可以通过测试,但是像坐标-平方变换这样的非线性变换不能通过。
练习4.16:二维向量变换是相对于X轴的镜像,这种变换接收一个向量并返回其相对于X轴的镜像向量。它应该保持X坐标不变,改变Y坐标符号。将这种变换称为Sₓ,图4-43展示了向量v=(3,2)和变换后的向量Sₓ(v)。 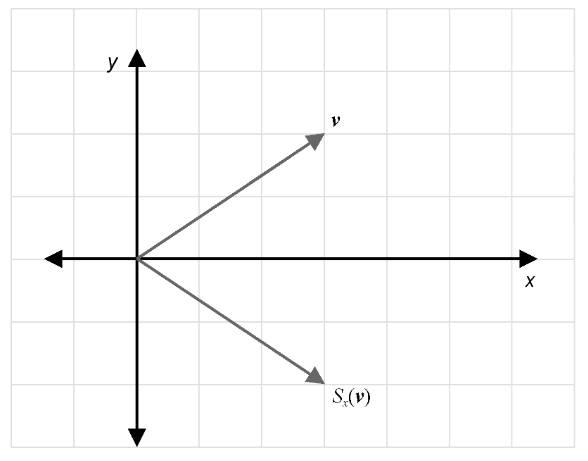
练习4.17(小项目):假设S和T都是线性变换。解释为什么S和T的组合也是线性的。
练习4.18:设T是Python函数rotate_x_by(pi/2)所做的线性变换,那么T(e1)、T(e2)和T(e3)分别是什么?
练习4.19:实现函数linear_combination(scalars, *vectors),接收一个标量列表和相同数量的向量,并返回一个向量。例如,linear_combination([ 1,2,3], (1,0,0), (0,1,0), (0,0, 1))应该返回1 * (1,0,0) + 2 * (0,1,0) + 3 * (0,0,1),即(1, 2, 3)。
练习4.20:编写函数transform_standard_basis(transform),将一个三维向量变换作为输入,并输出它对标准基的影响。它应该输出一个由3个向量组成的元组,这些向量是transform分别作用于e1、e2和e3的结果。
练习4.21:假设B是一个线性变换,满足B(e1)=(0,0,1)、B(e2)=(2,1,0)、B(e3)=(-1,0,-1)和v=(-1,1,2)。B(v)是什么?
练习4.22:假设A和B都是线性变换,而且A(e1)=(1,1,1)、A(e2)=(1,0,-1)、A(e3)=(0,1,1)、B(e1)=(0,0,1)、B(e2)=(2,1,0)、B(e3)=(-1,0,-1)。那么A(B(e1))、A(B(e2))和A(B(e3))是什么?
使用矩阵计算变换
用矩阵表示线性变换
练习5.1:实现函数infer_matrix(n, transformation),接收一个维度参数(比如2或3)和一个线性向量变换的函数参数,返回n * n方阵(一个n元组的n元组的数字集,表示线性变换的矩阵)。当然,只有当输入变换是线性时,输出才有意义;否则,表示的将是一个完全不同的函数!
练习5.2:如下2 × 2矩阵与二维向量的乘积结果是什么?((1.3,0.7)(6.5,3.2))((-2.5)(0.3))
练习5.3(小项目):实现random_matrix函数,用随机整数项生成指定大小的矩阵。使用该函数生成5对3 × 3矩阵。手动将每对矩阵相乘(用于练习),然后使用matrix_multiply函数来检查结果是否一致。
练习5.4:对于上一个练习中的每一组矩阵,按相反的顺序相乘,得到的结果一样吗?
练习5.5:在二维或三维中,有一个枯燥但重要的向量变换,叫作恒等变换,它接收一个向量并返回相同的向量。这种变换是线性的,因为它接收任意向量和、标量乘积或线性组合,并返回相同的东西。在二维和三维中,分别表示恒等变换的矩阵是什么?
练习5.6:对所有定义茶壶的向量应用矩阵((2, 1, 1), (1, 2, 1), (1,1, 2))。茶壶会发生什么情况,为什么?
练习5.7:使用两个嵌套推导式以不同的方式实现multiply_matrix_vector:一个遍历矩阵的行,另一个遍历每一行的项。
练习5.8:利用输出坐标是输入矩阵行与输入向量的点积这一事实,用另一种方式实现multiply_matrix_vector。
练习5.9(小项目):我首先告诉了你什么是线性变换,然后展示了任意线性变换都可以用矩阵来表示。现在来证明相反的事实:所有矩阵都表示线性变换。从二维向量乘以2 × 2矩阵或三维向量乘以3 × 3矩阵的显式公式开始,用代数法证明这一点。也就是说,证明矩阵乘法前后,向量和与标量乘积保持不变。
练习5.10:再一次使用5.1.3节中的两个矩阵。
A=[[1,1,0],[1,0,1],[1,-1,1]]
B=[[0,2,1],[0,1,0],[,1,0,-1]]
实现函数compose_a_b,执行A的线性变换和B的线性变换的组合,然后用本节前面练习中的infer_matrix函数来证明infer_matrix(3,compose_a_b)与矩阵积AB相同。
练习5.11(小项目):找出两个2 × 2矩阵,它们都不是单位矩阵I₂,但其乘积是单位矩阵。
练习5.12:方阵可以与自身相乘任意次数。可以把连续的矩阵乘法看作“取一个矩阵的幂”。对于方阵A,可以把AA写成A²,把AAA写成A³,以此类推。实现matrix_power(power, matrix)函数,取指定整数的矩阵的幂。
不同形状矩阵的含义
练习5.13:这个矩阵的维度是什么?
[[1,2,3,4,5],[6,7,8,9,1],[11,12,13,14,15]]
(a) 5 × 3(b) 3 × 5
练习5.14:将二维列向量看作矩阵时,其维度是多少?二维行向量呢?三维列向量呢?三维行向量呢?
练习5.15(小项目):我们的许多向量和矩阵操作使用了Python的zip函数。当给定不同大小的输入列表时,这个函数会截断两个列表中较长的那个,而不是直接失败。这意味着,当我们传递无效输入时,会得到无意义的结果。例如,在二维向量和三维向量之间并不存在点积,但我们的dot函数还是返回了一些东西。
1
2
3
>>> from vectors import dot
>>> dot((1,1),(1,1,1))
2
给所有的向量运算函数添加保护措施,以便函数能够抛出异常,而不是返回无效大小的向量值。一旦完成了这些工作,就可以证明matrix_multiply不再接收3 × 2和4 × 5矩阵的乘积。
练习5.16:以下哪些是有效的矩阵乘积?对于那些有效的矩阵乘积,乘积矩阵的维度是多少?
(a) [[10,0],[3,4]] [[8,2,3,6],[7,8,9,4],[5,7,0,9],[3,3,0,2]] (b) [[0,2,1,-2],[-2,1,-2,-1]] [[-3,-5],[1,-4],[-4,-4],[-2,-4]] (c) [[1],[3],[0]] [3,3,5,1,3,0,5,1] (d) [[9,2,3],[0,6,8],[7,7,9]] [[7,8,9],[10,7,8]]
练习5.17:将一个总项数为15的矩阵与一个总项数为6的矩阵相乘。两个矩阵的维度分别是多少?乘积矩阵的维度又是多少?
练习5.18:实现一个函数,将列向量转换成行向量,或者将行向量转换成列向量。像这样把一个矩阵翻转过来叫作转置,而得到的矩阵叫作原矩阵的转置矩阵。
练习5.19:画图说明10 × 8矩阵和5 × 8矩阵不能以该顺序相乘。
练习5.20:将如下三个矩阵相乘:A是5 × 7矩阵,B是2 × 3矩阵,C是3× 5矩阵。这三个矩阵能以什么顺序相乘?结果矩阵的大小又是多少?
[[1,0,0],[0,1,0],[0,0,1]]
练习5.21:将如下矩阵投影到YZ平面上和投影到XZ平面上都是从三维到二维的线性映射。它们的矩阵分别是什么?
练习5.22:举例说明之前练习中的infer_matrix函数可以为具有不同维度的输入和输出线性函数创建矩阵。
练习5.23:编写一个4 × 5矩阵,通过删除五项中的第三项来作用于五维向量,从而产生一个四维向量。例如,用(1, 2, 3, 4, 5)的列向量形式与它相乘,应该返回(1, 2, 4, 5)。
练习5.24(小项目):考虑6个变量组成的向量(l,e,m,o,n,s)。找出作用于这个向量的线性变换的矩阵,它能产生向量(s,o,l,e,m,n)作为结果。
提示:输出的第三个坐标等于输入的第一个坐标,所以变换必须将标准基向量(1, 0, 0, 0, 0, 0)转换成(0, 0, 1, 0, 0, 0)。
练习5.25:从5.2.5节中的矩阵M、N、P和Q可以得到哪些有效的乘积?将矩阵与自身的乘积也纳入考虑。对于那些有效的乘积,矩阵乘积的维度又是多少?
练习5.26:证明如果把二维图形(例如我们一直使用的恐龙)移动到Z = 2平面上,三维“神奇”矩阵变换将不起作用。那么会发生什么呢?
练习5.27:构造一个矩阵,将恐龙在X方向上平移-2个单位,在Y方向上平移-2个单位,执行变换并显示结果。
练习5.28:证明如下形式的任何矩阵:
[[a,b,c],[d,e,f],[0,0,1]]
都不会影响它所乘的三维列向量的Z坐标。
练习5.29(小项目):找出一个3 × 3矩阵,将Z=1平面上的二维图形旋转45°,将其尺寸缩小1/2并平移(2, 2)。通过将该矩阵应用于恐龙的顶点来演示其工作原理。
练习5.30:之前练习中的矩阵使恐龙旋转45°,然后将其平移了(3, 1)。使用矩阵乘法,构建一个与之顺序相反的矩阵。
练习5.31:实现一个类似于translate_3d的函数,称为translate_4d。该函数使用一个5 × 5矩阵通过一个四维向量平移另一个四维向量。运行一个示例来说明坐标会被平移。
高维泛化
泛化向量的定义
练习6.1:实现继承自Vector的类Vec3。
练习6.2(小项目):实现一个继承自Vector的类CoordinateVector,添加一个代表维度的抽象属性,以此节省因为坐标维度不同而带来的重复工作。从CoordinateVector继承并将维度设置为6就能实现类Vec6。
练习6.3:在Vector类中添加一个zero抽象方法,以返回给定向量空间中的零向量,并且实现取反运算符。有了这两样,向量空间就有了零向量,并能对其中的任意向量取反。
练习6.4:为Vec3编写单元测试,以证明它的向量加法和标量乘法运算满足向量空间属性。
练习6.5:对于任意向量v,增加单元测试来证明O + v = v、0 * v = 0和-v + v = O,其中的0是数,O是零向量。
练习6.6:由于Vec2和Vec3实现了==运算符重载,结果是Vec2(1,2) ==Vec3(1,2,3)返回True。Python的鸭子类型(duck typing)看起来太宽容了!通过添加一个检查来解决这个问题:在测试向量相等性之前,确认类型必须一致。
练习6.7:在Vector上实现一个__truediv__方法,允许你用向量除以标量。将向量乘以标量的倒数(1.0/标量),就可以将向量除以非零标量。
探索不同的向量空间
练习6.8:用u、v和w三个浮点值代替继承自Vector类的对象进行向量空间的单元测试,证明实数确实是向量。
练习6.9(小项目):对CarForSale进行向量空间的单元测试,证明它的对象形成了一个向量空间(忽略其文本属性)。
练习6.10:实现Function(Vector)类,只接收一个变量的函数作为其构造函数的参数,并实现__call__方法,以便将其作为一个函数来处理。应该可以执行plot([f,g,f+g,3*g], -10,10)这样的代码。
练习6.11(小项目):测试函数的相等性是一件困难的事情,但请尽力写一个函数来测试两个函数是否相等。
练习6.12(小项目):对Function类进行单元测试,证明函数满足向量空间的属性。
练习6.13(小项目):实现类Function2(Vector),表示带有两个变量的函数,如f(x,y)=x+y。
练习6.14:9 × 9矩阵的向量空间的维度是多少?
练习6.15(小项目):实现一个继承自Vector的类Matrix,用抽象属性表示行列数。虽然无法实例化一个Matrix类,但可以通过继承Matrix并明确指定行列数来创建Matrix5_by_3类。
练习6.16:对Matrix5_by_3类进行单元测试,证明它满足向量空间的定义。
练习6.17(小项目):编写一个继承自Vector的类LinearMap3d_to_5d,使用5 × 3矩阵作为数据源,编写__call__方法来实现从R³到R⁵的线性映射。证明它在计算方式上与Matrix5_by_3一致,并证明它也满足向量空间的定义。
练习6.18(小项目):编写一个能够对Matrix5_by_3对象和Vec3对象运行矩阵乘法的Python函数。对向量和矩阵类的*运算符进行重载,以便将变量或矩阵与向量相乘。
练习6.19:证明ImageVector类的零向量和图像相加时不会明显改变任何图像。
练习6.20:选择两幅图像并按照不同比例进行加权平均运算,生成10幅不同的图像。所生成图像上的点即为在27万维空间中的两幅图像上像素点的线性组合!
练习6.21:将针对向量空间的单元测试修改为适用于图像的,看看如何为单元测试生成随机图像。
寻找更小的向量空间
练习6.22:从几何角度证明为什么如图6-30所示的区域S不是该平面的向量子空间。 
练习6.23:证明X=0的平面区域构成一维向量空间。
练习6.24:尝试把向量(1, 0)、(1, 1)和(-1, 1)中的每个写成另外两个向量的线性组合,证明它们是线性相关的。
练习6.25:证明任意向量(x,y)是(1, 0)和(1, 1)的线性组合。
练习6.26:给定一个向量v,解释为什么v所有线性组合的集合与v所有标量乘积的集合相同。
练习6.27:从几何的角度证明为什么一条不通过原点的直线不是(二维平面或三维空间的)向量子空间。
练习6.28:{e1,e2,e3}中的任意两个都无法生成R³,只能生成一个三维空间的二维子空间,那么这些子空间是什么?
练习6.29:把向量(-5, 4)写成(0, 3)和(-2, 1)的线性组合。
练习6.30(小项目):(1, 2, 0)、(5, 0, 5)和(2, -6, 5)之间是线性相关还是线性无关的?
练习6.31:解释为什么线性函数f(x) = ax + b不是从向量空间到其自身的线性映射,除非b = 0。
练习6.32:重新实现LinearFunction类,从Vec2继承并实现__call__方法。
练习6.33:(用代数方式)证明f(x)=ax + b形式的线性函数构成所有函数向量空间的向量子空间。
练习6.34:找出3 × 3矩阵的基,这个向量空间的维度是多少?
练习6.35(小项目):实现类QuadraticFunction(Vector)来表示ax² + bx + c形式的函数生成的向量子空间。这个子空间的基是什么?
练习6.36(小项目):{4x+1,x-2}是线性函数的基,请尝试把-2x + 5写成这两个函数的线性组合。
练习6.37(小项目):所有多项式的向量空间是一个无限维的子空间。将该向量空间实现为一个类,并找出它的基(必须是一个无限集合)。
练习6.38:本章向你展示了27万维图像空间的基向量的伪代码,那么第二个基向量是什么样的?
练习6.39:编写函数solid_color(r,g,b),返回一个纯色的ImageVector,为每个像素指定红、绿、蓝的具体数值。
练习6.40(小项目):通过对每个像素的亮度(红、绿、蓝的平均值)进行平均,实现将300 × 300的图像转换成30 × 30灰度图像的线性映射函数。接下来实现一个线性映射函数,从30 × 30的灰度图像还原出一个新的ImageVector。
求解线性方程组
设计一款街机游戏
练习7.1:在PolygonModel上实现transformed()方法。该方法返回由对象的X属性和Y属性转换并由rotation_angle属性旋转的模型的点。
练习7.2:实现一个函数to_pixels(x,y)。该函数取正方形中的一对坐标X和Y,其中-10 < X < 10以及-10 < Y < 10,并将它们映射到对应的PyGame X和Y像素坐标,每个坐标的范围为0到400。
找到直线的交点
练习7.3:u + t * v可能是一条穿过原点的直线。在这种情况下,向量u和v有什么特征?
练习7.4:如果v = O = (0,0),u + t * v形式的点是否表示一条直线?
练习7.5:结果证明公式u + t * v不是唯一的;也就是说,可以取不同的u和t来表示同一条直线。那么,另一条表示(2,2) + t * (-1,3)的直线是什么?
练习7.6:对任意a、b和c的值,方程a * x + b * y = c是否都能表示一条直线?
练习7.7:求直线2x + y = 3的另一个方程,证明a、b、c不是唯一的。
练习7.8:方程a * x + b * y = c等价于包含两个二维向量的点积的方程:(a,b)(x,y) = c。因此,可以说一条直线是一组向量,与给定向量的点积是常数。这一表述的几何解释是什么?
练习7.9:向量(0, 7)和(3.5, 0)是否都满足方程2x + y = 7。
练习7.10:画出(3,0) + t(0,1)的图形,并用公式将其转化为标准形式。
练习7.11:编写一个Python函数standard_form,该函数接收两个向量v1和v2并找到通过这两个向量的直线ax + by = c。
练习7.12(小项目):对于do_segments_intersect中的四项距离检查中的每一项,找到一对线段,它们未通过其中一项检查,但通过了其他三项检查。
练习7.13:对于激光线和小行星的例子,确认does_intersect函数返回True。(提示:使用网格线找到小行星的顶点并创建一个代表小行星的PolygonModel对象。)
练习7.14:实现does_collide(other_polygon)方法,通过检查定义两个多边形的任何线段是否相交来确定当前PolygonModel对象是否与other_polygon发生碰撞。这可以帮助我们确定小行星是撞击了飞船还是撞击了另一颗小行星。
练习7.15(小项目):我们无法找到一个向量w,使下面的方程组有唯一解v。
[[2,1],[4,2]]v = w
找到一个向量w,使该方程组具有无穷多个解;也就是说,有无穷多个v值满足这个方程组。
将线性方程泛化到更高维度
练习7.16:通过(5, 4)并垂直于(-3, 3)的直线方程是什么?
练习7.17(小项目):思考四维中的如下两个线性方程。
x₁ + 2x₂ + 2x₃ + x₄ = 0
x₁ - x₄ = 0
用代数法(而不是几何法)解释,为什么方程组的解会形成四维的向量子空间。
练习7.18:通过点(1, 1, 1)并垂直于向量(1, 1, 1)的平面的标准方程是什么?
练习7.19(小项目):写一个Python函数,输入是三个三维点,返回它们所在平面的标准方程。例如,如果标准方程是ax + by + cz = d,则函数可以返回元组(a,b,c,d)。
提示:三个向量中任何一对向量的差都是平行于平面的,所以向量差的向量积是垂直的。
练习7.20:如图7-30所示的矩阵方程中共有多少个常数aᵢⱼ?有多少个方程?有多少个未知数?写出完整的矩阵方程和完整的线性方程组(无省略号)。 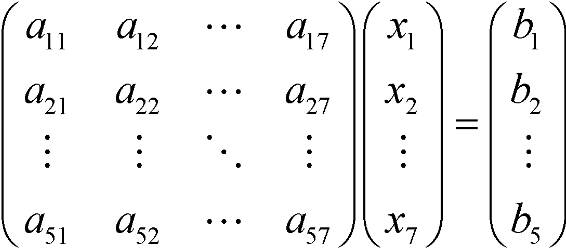
练习7.21:写出线性方程来替代如下求和简写。在几何上,线性方程的解是什么样的? 
练习7.22:画出三个互不平行且没有共同唯一交点的平面。(最好列出其方程并画出它们!)
练习7.23:假设有m个线性方程和n个未知变量。以下m和n的取值是否存在唯一解?
(a) m=2,n=2(b)m=2,n=7(c) m=5,n=5(d) m=3,n=2
练习7.24:找出三个相交于一点的平面,三个相交于一条直线的平面,和三个相交于一个平面的平面。
练习7.25:在不使用Python的情况下,求x₅=3、x₂=1、x₄=-1、x₁=0和x₁ + x₂ + x₃ = -2这个五维线性方程组的解。用NumPy验证答案。
练习7.26(小项目):对于任何维数,都有一个单位矩阵作为恒等映射。n维单位矩阵I乘以任何向量v,都会得到相同的向量v,即Iv = v。Iv = w是一个容易求解的线性方程组:v的一个可能解是v = w。这个小项目的思路是,从线性方程组Av = w开始,两边同时用另一个矩阵B相乘,使(BA) = I,进而得到(BA)v = Bw和Iv = Bw(即v = Bw)。换句话说,如果有方程组Av = w,还有一个合适的矩阵B,那么Bw就是方程组的解。这个矩阵B叫作A的逆矩阵。
我们再来看一下在7.3.2节中求解的方程组。
[[1,1,-1],[0,2,-1],[1,0,1]][[x],[y],[z]] = [[-1],[3],[2]]
首先,使用NumPy函数numpy.linalg.inv(matrix)。该函数会返回指定矩阵的逆,以找到上述方程左侧矩阵的逆。然后,将方程两边乘这个矩阵,就能得到方程的解。将你的答案与NumPy的求解结果进行比较。
(BA) = I:还可以使用NumPy的内置矩阵乘法接口numpy.matmul,使计算更简单。
通过解线性方程来改变向量的基
练习7.27:如何将向量(5, 5)写成(10, 1)和(3, 2)的线性组合?
练习7.28:将向量(3, 0, 6, 9)写成向量(0, 0, 1, 1)、(0, -2, -1, -1)、(1, -2,0, 2)和(0, 0, -2, 1)的线性组合。